


And the Hackathon’s Winners are: Autonomous Mapping and Navigation System

Team members Maya, Yedidya, Alin and Chen have developed an autonomous mapping and navigation system, mounted on drone or robots, which allows them to navigate their way back even when contact is lost
 The winning team of this Hackathon is 100% pre-military students: Maya Bramli and Yedidya Halperin, an Electrical Engineering undergraduate, and Alin Golan, a Computer Engineering undergraduate, are part of the Academization program. Chen Kruphman, a Computer Engineering undergraduate, is an Academic Reserve tracker. “We’re all into the final year of our degree, and with the four of us joining the military next year, it was our last chance to participate in the Hackathon,” says Maya Bramli. “Putting the team together, I wanted to bring in people from all disciplines; I wanted to have two Electrical Engineering guys on board and two others from Computer Engineering. And so it turned out: Yedidya and I brought in the Arduino system know-how and worked on the hardware, while Alin and Chen had the programming savvy and worked on the software part.
The winning team of this Hackathon is 100% pre-military students: Maya Bramli and Yedidya Halperin, an Electrical Engineering undergraduate, and Alin Golan, a Computer Engineering undergraduate, are part of the Academization program. Chen Kruphman, a Computer Engineering undergraduate, is an Academic Reserve tracker. “We’re all into the final year of our degree, and with the four of us joining the military next year, it was our last chance to participate in the Hackathon,” says Maya Bramli. “Putting the team together, I wanted to bring in people from all disciplines; I wanted to have two Electrical Engineering guys on board and two others from Computer Engineering. And so it turned out: Yedidya and I brought in the Arduino system know-how and worked on the hardware, while Alin and Chen had the programming savvy and worked on the software part.
The team members had embarked on their brainstorming even before the opening session, throwing up ideas on defusing bombs and tunnel mapping. “When I arrived at the opening session, Yahalom Unit had just posed a drone navigation issue: once a drone lost contact, with either the operator or the GPS, it had no way of returning to its starting point and was in fact stuck. I, therefore, came up with the idea of creating a navigation system that only uses the starting point of the drone and data gathered along the way, in order to chart the flight course back to the launching point,” says Maya. “The system can venture beyond drone navigation and be used for tunnel mapping by robots.”
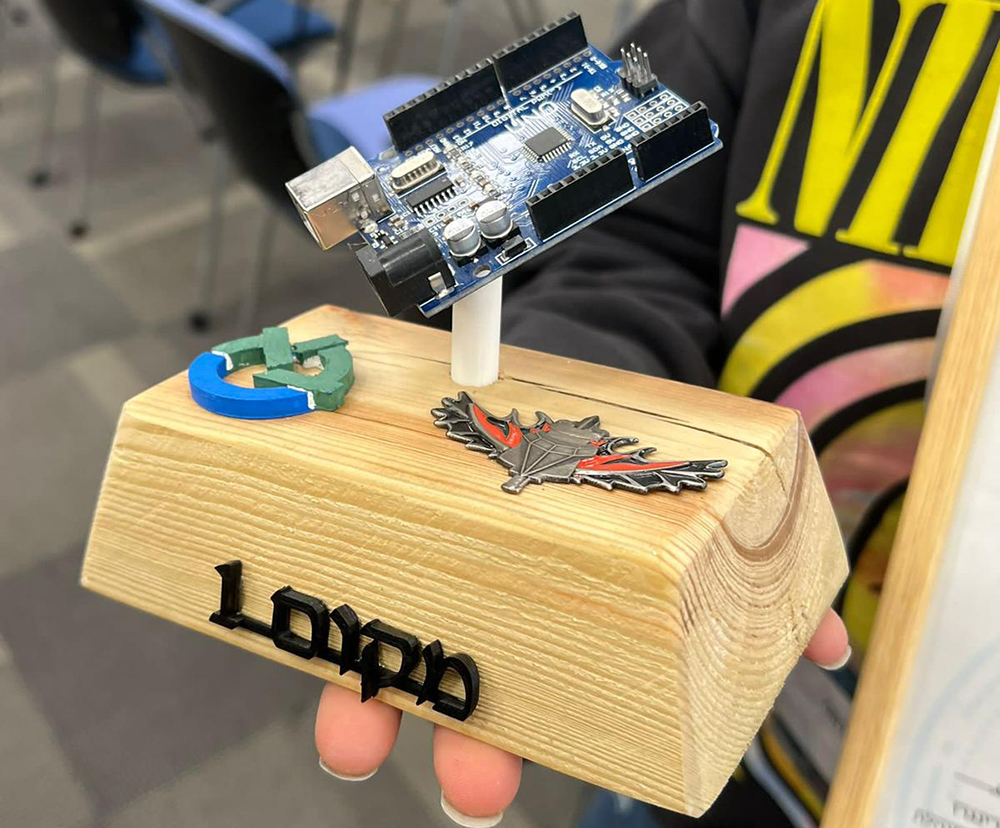
.jpeg) The team’s own mapping and navigation system is independent of outside elements, like Wi-Fi, GPS or Bluetooth. It comprises a gyroscope and accelerometer, which detect the angular speed and component acceleration of the object on which they are mounted, respectively. These in turn allow us to retrieve the information required to trace the return route, by using mathematical calculations, coordinate system transfer, noise filter, and control feedback. “The component in fact samples its location every tenth of a second, which allows it to reevaluate its return journey and if necessary, direct it back,” explains Maya. “And the big plus is that all the components required in for implementing our system can already be found in military drones, which means the system can be integrated into the drone with no additional components: Just add our code to the drone, and it’s good to go.”
The team’s own mapping and navigation system is independent of outside elements, like Wi-Fi, GPS or Bluetooth. It comprises a gyroscope and accelerometer, which detect the angular speed and component acceleration of the object on which they are mounted, respectively. These in turn allow us to retrieve the information required to trace the return route, by using mathematical calculations, coordinate system transfer, noise filter, and control feedback. “The component in fact samples its location every tenth of a second, which allows it to reevaluate its return journey and if necessary, direct it back,” explains Maya. “And the big plus is that all the components required in for implementing our system can already be found in military drones, which means the system can be integrated into the drone with no additional components: Just add our code to the drone, and it’s good to go.”
As the idea had been hatched before the Hackathon commenced, the group could ask for all necessary components in advance. “During the Hackathon itself, we had our focus on building the system, and started working on integrating the different components together and the mathematical transitions required to achieve the drone’s position. In addition, we incorporated sonar sensors, to identify whether the drone was indoors or outdoors, and proceed accordingly,” says Maya. “Our work as a group was dynamic, our collaboration worked out really well and I reckon that at the end of the day, that's what’s landed us the top spot. Plus, we enjoyed the help of Ran Levi, last year’s Hackathon winner, as well as Liri Benzinou, who served as a mentor.
As the Hackathon was drawing to an end, with the presentation stage, the team members conducted a trial to stimulate the system’s operation with the drone in motion. “In order to confirm the mapping’s accuracy, I walked with the component along a random route, we retrieved the information gathered by the sensor while the component was in motion and by processing the data, then managed to accurately retrace its journey. Following 24 hours, we emerged with a finished, properly functioning product. For the next stage, as a follow-up work to enhance the system accuracy, we thought we might integrate it with AI that identified particular objects (through image processing), to serve as hooks in retracing the journey.”
The autonomous navigation system earned the team the top prize of ten thousand NIS, as well as the option to pursue the system’s development vis-à-vis the unit. “We would like to continue developing the product vis-à-vis Yahalom Unit. We feel we have a good system in place, and this could be an opportunity to collaborate with the army and give back to our country,” as Maya sums up.
Last Updated Date : 29/06/2023
