


המקום השני בהאקתון: מודל תלת מימדי לרובוטים

הקבוצה של אביב, להב, איתי, אייל ואשר פיתחה מערכת אשר תאפשר לראות רובוטים במהלך פעולות על תמונה תלת מימדית, ולקבל מידע מדויק על המיקום שלהם במרחב
"ההאקתון היה בשבילי חוויה מטורפת ממש", מעיד אביב גבאי בן ה-19. "זה ההאקתון הראשון שלי, רציתי להגיע לזה כשאני מאמין שיש לי מספיק ידע, והיה לי כל כך כיף לעבוד ביחד עם חברי הקבוצה שלי כל הזמן הזה, ולהכיר אנשים חדשים וסביבות עבודה חדשות ולהתנסות בנושאים חדשים ובדברים שלאו דווקא למדתי באוניברסיטה, ואני שמח שהצלחנו להגיע למקום הזה, עם הקבוצה הזאת. אני ממש גאה בקבוצה שלי".
 מודל תלת מימדי לרובוטים
מודל תלת מימדי לרובוטים
גבאי הוא סטודנט שנה ג במסלול להנדסת מחשבים. לקראת ההאקתון חבר לארבע חברים נוספים, אקדמיזטורים כולם במסלולים המשולבים להנדסה ולפיזיקה: אשר לג׳ימי, איתי אלמליח ואייל יצחייק משנה ד׳, ולהב דבאח משנה ג׳. "נרשמנו להאקתון קצת באיחור, ממש שבוע לפני, ובגלל שזה לא ההאקתון הראשון של רוב חברי הצוות וההזדמנות האחרונה של חלקינו, מאוד רצינו לקחת את זה ברצינות ולהשקיע בזה", הוא מספר. "שבוע לפני ההאקתון התחלנו לעשות סיעור מוחות ולראות עם מה אנחנו רוצים ללכת. בהתחלה רצינו להתמקד בפתרון שקורה בשטח ובעזרים ספציפיים, למשל לסיכול ונטרול מוקשים. רק יום לפני ההאקתון שינינו כיוון והחלטנו לשפר את האמצעים שהציגו לנו בכנס מבחינה כללית, ולהתמקד בשיפור של הרובוט הקיים של יחידת יהל"ם. לרובוט הזה יש ארבע מצלמות: קדמית, אחורית, 360 ולגובה, ובמצב כזה ההבנה של איפה הוא נמצא במרחב מאוד לא נוחה, וחיפשנו דרך לשפר את זה. החלטנו ליצור מודל תלת מימדי שממדל את הסביבה שהרובוט רואה, ולהדביק את המרחב הזה על מודל בסביבת מחשב. בפועל, זה אומר שאנחנו יוצרים לרובוט מצלמת גוף שלישי, שתאפשר לנו לראותו אותו במרכז המסך ואת כל מה שקורה סביבו, כמו שאנחנו רואים למשל דמויות במשחקי מחשב. זה מאפשר הבנה הרבה יותר טובה של איפה הרובוט נמצא במרחב, ומקל על ההתמצאות".
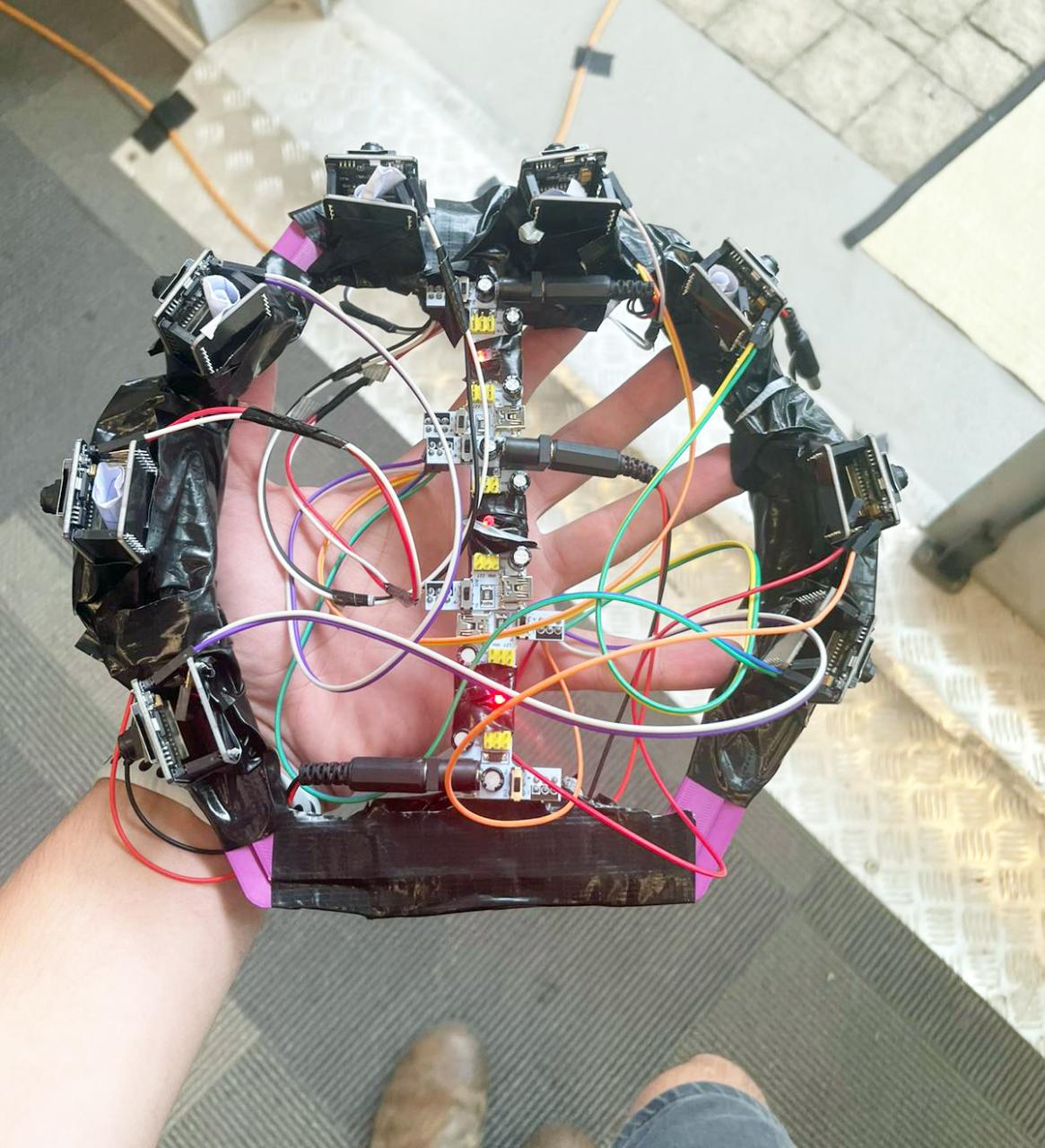
המערכת שבנתה הקבוצה כללה מודל פיזי בצורת משושה, עליו הודבקו מצלמות המופנות החוצה בצורה מעגלית, וקוד שמעבד את הפלט של המצלמות ומתרגם אותו לתמונה פנורמית של המרחב. "מהדאטה שקיבלנו מהמצלמות בנינו, באמצעות מנוע גרפי, תמונה מרחבית תלת מימדית. בכל פעם שתמונה פנורמית חדשה נוצרה, לקחנו את התמונה הזאת והדבקנו אותה על כל המרחב התלת מימדי שיצרנו. כך, הצלחנו למקם את האובייקט שלנו, הרובוט, במרכז המסך, כשסביבו כל מה שהוא רואה בפועל. כל זה משודר למסך של המפעיל, והוא יכול לבחור אם לראות דרך העיניים של הרובוט, כלומר את מה שהוא רואה, או את התמונה התלת מימדית".
חמשת חברי הצוות חילקו ביניהם את העבודה. "להב היה אחראי על בניית הקוד שתופר יחד את התמונות מהמצלמות. איתי עבד על הקוד שדאג שכל מצלמה תעלה את הקוד שלה לשרת כלשהו, כך שתהיה אליהן גישה וגם חיווט את המצלמות. אני הייתי אחראי על בניית המרחב התלת מימדי, והאפשרות להסתכל במרחב, שיהיה אפשר לזוז עם העכבר והדמות תסתכל לאן שהמפעיל רוצה. אייל היה אחראי על המודל הפיזי ועל הדבקת המצלמות. ואשר כתב את הקוד שמעדכן את המרחב בסביבה התלת מימדית עם התמונות הפנורמיות החדשות בזמן אמת, וכן עזר איפה שהיה צריך ונגע בכל הצדדים של הפרויקט. כל אחד עשה את החלק שלו - אבל שיתפנו פעולה ועבדנו ביחד, בעיקר לקראת הסוף. גם נעזרנו לא מעט במנטורים, ובפרט ברן לוי, שעזר לנו מאוד עם הקוד של המצלמות, בלירי בנזינו, שעזרה לאורך שעות הלילה בעיקר בנושא שרתי המצלמות, ובנציגים של היחידה ושל הפקולטה. בכלל, כולם היו להוטים לעזור וניכר היה שלכולם יש כוונות טובות ועל כך אנחנו מודים להם מאוד".
הפרויקט שפיתחה הקבוצה זיכה אותה במקום השני של ההאקתון, ובפרס של חמשת אלפים שקלים. "אבל מעבר לפרס הכספי", מצהיר אביב, "החלק החשוב מבחינתנו הוא שעבדנו טוב ביחד כקבוצה, והסיפוק הגדול, לאחר כל העבודה הקשה, מההגעה למוצר עובד".

תאריך עדכון אחרון : 29/06/2023
